

Imagine a world where your car whisks you to work, school, or anywhere you wish to go without a flick of your finger on the steering wheel. This is not a far-off sci-fi fantasy but a near reality, thanks to the pioneering GenAD framework. The groundbreaking research introduces a sophisticated video prediction model tailored for autonomous driving, leveraging an expansive dataset named OpenDV-2K, which includes over 2000 hours of diverse driving footage. GenAD represents a significant leap towards the dream of universal autonomous driving, marrying the intricacies of video prediction with the dynamism of real-world driving conditions.
A Glimpse into the Future
The bedrock of any AI-driven technology is data, and in the realm of autonomous driving, the diversity and quality of this data are paramount. The OpenDV-2K dataset stands out by offering an unparalleled range of driving scenarios, weather conditions, and geographical diversity. It is a testament to the potential of learning from the vast expanses of data available online, pushing the boundaries of what autonomous vehicles can understand and predict about their environment. This dataset not only fuels the GenAD model but also sets a new benchmark for future research in the field.
The Brain Behind the Wheel
The essence of navigating the roads lies in prediction and decision-making. The GenAD framework excels in this by learning from the past to predict the future, a critical competency for any autonomous system. Through its innovative two-stage learning process, GenAD can simulate realistic driving scenarios, respond to textual commands, and even plan movements based on predicted actions. This adaptability and foresight embody the advanced cognitive capabilities required for autonomous vehicles to make safe and efficient decisions on the fly.
Bridging Theory and Practice
Validation through rigorous experimentation underscores GenAD’s superior performance and generalization capabilities. Whether it’s the seamless adaptation to unseen driving datasets or its proficiency in generating plausible future driving scenarios based on language instructions, GenAD’s results are compelling. These achievements not only signify a remarkable technical milestone but also illustrate the model’s practical applicability across various real-world settings and challenges.
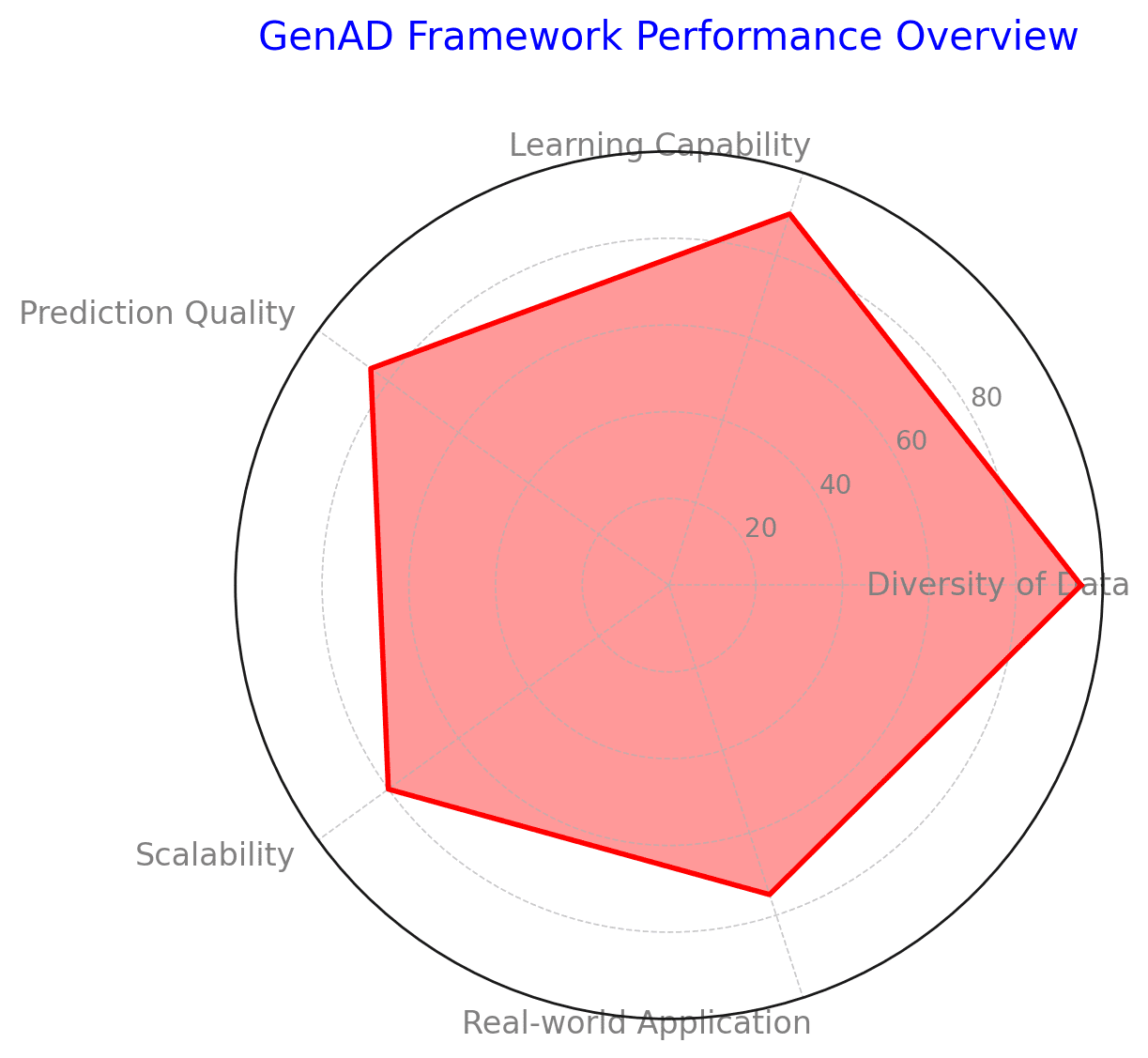
To better understand the breakthroughs achieved by the GenAD framework and the OpenDV-2K dataset, let’s take a look at a radar map below of their performance across different dimensions critical to autonomous driving development.
Extending the Horizon
The journey doesn’t end with prediction. The GenAD framework extends its utility by incorporating action-conditioned prediction and motion planning. This foray into simulation and planning showcases the model’s versatility in navigating the complex web of real-life driving scenarios, emphasizing its potential to serve as the cognitive core of autonomous driving systems. Through these extensions, GenAD moves a step closer to realizing the full spectrum of autonomous driving capabilities.
Over 2000 Hours of Driving Data
The OpenDV-2K dataset’s vast library encompasses driving footage from over 40 countries, making it the most diverse and comprehensive dataset for autonomous driving to date. This diversity is crucial for training models to handle the unpredictable nature of real-world driving.
Zero-Shot Learning Capabilities
GenAD’s ability to generalize to unseen datasets without any additional training is a testament to its robustness and adaptability. This capability is vital for deploying autonomous vehicles in new environments without the need for extensive retraining.
Language-conditioned Prediction
The model’s proficiency in generating future driving scenarios based on textual instructions bridges the gap between human language and machine perception. This unique feature paves the way for intuitive human-vehicle interactions.
High-Quality Simulation and Planning
GenAD extends beyond prediction to simulate realistic driving scenarios and plan future actions, demonstrating its potential to function as an all-encompassing brain for autonomous vehicles. This ability to simulate and plan is crucial for developing safer and more reliable autonomous driving systems.
Efficiency and Scalability
Despite the complexities involved in processing and learning from large-scale video data, GenAD’s training and adaptation mechanisms ensure efficiency and scalability. This efficiency is vital for the practical application of such advanced models in real-world scenarios.
A Beacon of Hope
The journey of GenAD and the OpenDV-2K dataset lights the path towards a future where autonomous driving transcends current limitations. This research not only demonstrates technical prowess but also ignites the imagination, encouraging us to envision a world where vehicles understand, predict, and navigate the complexities of the road with grace and precision. As we stand on the brink of this new era, GenAD represents not just a leap in technology but a stride towards a safer, more efficient, and interconnected world.
The road ahead is promising, and with continued innovation and exploration, the dream of universal autonomous driving is within reach, ready to redefine our relationship with transportation and technology.
About Disruptive Concepts
Welcome to @Disruptive Concepts — your crystal ball into the future of technology. 🚀 Subscribe for new insight videos every Saturday!





